Meade LX200GPS 8" (RA Motor Encoder)
This work is part of my investigation into Sidereal Rate tracking errors that have been observed in both Polar & Alt/Az modes.
This PDF document shows errors observed in Polar mode Sidereal Rate.
The oscillation in velocity is due to the motor control PWM feedback damping, and is a function of the firmware in the motor board. (15-7210-00 Rev E)
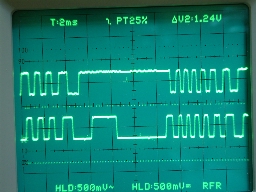
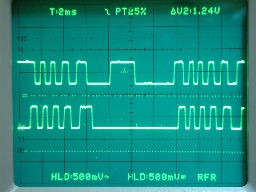
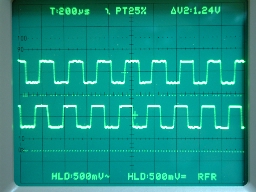
The indicated mean velocity error is believed to be caused by encoder jitters that causes missing pulses in the quadrature signals from the encoder. (US Digital E4-256-091-L) These missing pulses are shown in the first to images below. The upper trace is output A & the lower trace is output B. The third image shows a clean part of the trace.
The missing pulses occur about 1% of the time at Sidereal rate but are absent at higher velocities.
PLEASE NOTE: the mean pulse repeat period is 37.5ms. Ignore the display T=2ms & T=200us, this was a setup error by me, the timebase was set to variable. The pictures are for the purpose of demonstrating the missing pulse only..
Click on the image to enlarge.
If this encoder jitters, at low velocity, are not handled correctly by the motor control firmware, there will be two results of potential error.
1.) While tracking there will be a step positional shift at each missing pulse.
2.) A long term tracking drift (variable & random) of between +1% to +2% will be seen.
This problem is seen in both RA & DEC motor boards.
This work is by no means completed and as investigations proceed, this page will be updated.
All photographs a copyright of Conrad Maloney (CRCM Networks, United Kingdom)